24小時咨詢熱線:
18836269550
近期相信大家都對“皮帶輸送機的電機功率平衡”這個話題比較感興趣,要想知道這個話題答案,那么我們首先要了解一些與之相關的內容,坤威機械的小編精心整理了該話題的相關內容,那么下面就讓坤威機械的小編帶大家一起了解一下吧!
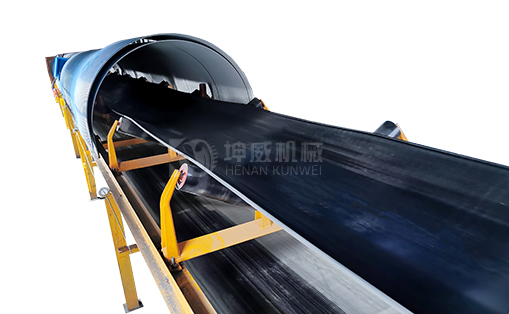
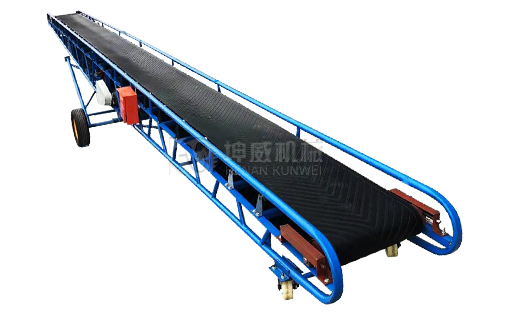
皮帶輸送機是一種摩擦驅動以連續方式運輸物料的機械。主要由機架、輸送帶、托輥、滾筒、張緊裝置、傳動裝置等組成。皮帶輸送機最為煤礦及礦山等企業的主要輸送設備,了解皮帶輸送機的電機功率平衡與電機節能降低企業成本有重要意義。今天我們就來探討皮帶輸送機的電機功率平衡與電機節能。
通常長距離皮帶輸送機需要多臺大功率電機同時驅動,而在電機選擇時,通常要考慮25%-40%的富裕系數;同時受到工作面采掘不平衡影響,輸送機載荷也是不均勻的,因而其實際運行過程中處于滿載、輕載、空載三種不同狀態之中。若輸送機帶速與其運量不相匹配,則會導致能源的浪費,如何減小輸送機運行過程中的能源消耗,降低運輸成本,對提高煤炭企業經濟效益具有重要作用。
長距離帶式輸送機由多臺交流變頻電動機驅動,受各種因素影響,會出現電動機功率不平衡現象,從而導致電機負荷分配不均,嚴重時可能會燒毀電機。因而需要采取一定措施對輸送機功率平衡進行控制。電機平衡受到靜態和動態兩類因素的影響,靜態因素取決于輸送機原始設計參數,良好的設計可使靜態功率平衡達到良好的效果;動態因素即輸送機運行過程中瞬時不平衡狀態,對動態功率不平衡現象能夠及時做出響應則可取得良好的效果。
具體生產實踐中,在輸送機靜態參數已經確定后,可通過供電頻率來進行電動機功率平衡的調節。傳統電機功率平衡控制有并行控制和主從控制兩種策略。并行控制即對多臺電動機設置統一的參數,所有電動機按照設定參數運行,主從控制即主要對主機參數進行設置,而從機通過對主機輸出進行跟蹤,最終實現同步運行。并行控制具有抗干擾性較差的缺點,而主從控制同步運行性差。基于耦合補償的功率平衡方法,通過對每臺電動機運行參數變化值進行采集,對其運行參數差異進行分析,針對性地進行補償。這種方法同時考慮了單機驅動系統給定轉速與實際轉速之間的誤差及不同電機間的同步誤差。只要運行系統中任何一臺電機發生變化時,都會對整個系統發出反饋。
為了提高輸送機的運輸效率,減少電能消耗,需采取措施對輸送機的帶速進行調節,當輸送機載荷發生變化時,根據載荷及時調整帶速,以實現節能運行,延長壽命的目的。輸送機由電機驅動運轉,運行過程中輸送帶與滾筒、托輥等都會產生阻力,通常輸送機阻力主要有:輸送帶在托輥上的摩擦阻力、物料的擠壓阻力、托輥的運行阻力、輸送帶的彎曲擺動阻力等。
對于具體帶式輸送機而言,對帶式輸送機功率影響的主要因素是輸送機的運量Q和帶速v,當運量Q一定時,輸送機功率 P 與帶速v成正比,同理,若輸送帶v提高,則克服阻力所消耗功率也相應增加,因此,可以通過降低帶速v來降低輸送機功率消耗,最終實現節能的目的。帶式輸送機運量大小與生產地質條件及工藝設備有關系,因此具有很大的不確定性,因此可通過研究輸送帶帶速與物料充填率的關系來降低輸送機能耗。在運量一定的情況下,輸送帶帶速越低,物料的充填率越高,因此可通過降低帶速來提高物料充填率,以達到節能目的。在輸送量下降的情況下,若速度不變則會增大能量消耗,因此在輸送帶運量較小的情況下,輸送帶帶速可通過設計的最小值選取。
以上就是坤威機械為大家整理《皮帶輸送機的電機功率平衡》的全部內容了,(以上內容僅供參考,具體情況需要具體分析,并不適用于所有現場。如有問題概不負責。)如果想了解更多關于輸送機的知識,請撥打我們的電話進行聯系吧
本文標題:皮帶輸送機的電機功率平衡
本文作者:河南坤威機械制造有限公司